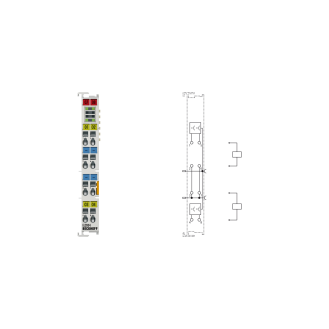
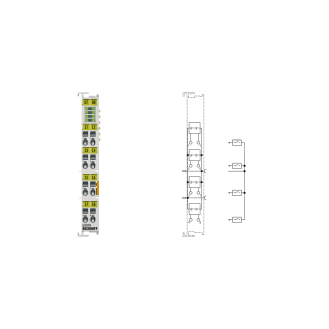
Terminal EtherCAT à 1 canal pour servomoteurEL7201
408,00 €Prix TTC
Quantité
Paiement sécurisé
Virement bancaire
Informations de livraison
2 articles en stock
Frais de livraison à partir de :36,00 €TTC
Livraison entre le 19/10 et le 21/10
Vendu et expédié par





Découvrez les produits BECKHOFF
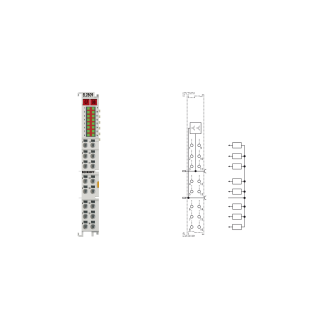
Le terminal EtherCAT EL7201 est conçu pour offrir des performances servo exceptionnelles dans un format compact. Grâce à son interface résolveur intégrée, il permet un contrôle rapide et précis basé sur la technologie de courant orienté vers le champ et le contrôle de vitesse PI. Ce terminal est idéal pour des tâches de positionnement dynamiques et rapides.
La surveillance de paramètres critiques tels que la surtension, la sous-tension, la surintensité, et la température assure une sécurité de fonctionnement optimale. Le système de communication EtherCAT et la couche d'application CAN-over-EtherCAT (CoE) garantissent une intégration parfaite avec les technologies de contrôle basées sur PC.
Les semi-conducteurs de puissance avancés minimisent les pertes d'énergie et permettent un retour d'énergie lors du freinage. Les 16 LED intégrées fournissent des indications claires sur l'état, les avertissements et les erreurs.
Caractéristiques principales :
- Technologie d'entraînement compacte
- Connexion directe au moteur + retour d'information
- 1 x feedback
- Moteur synchrone triphasé à excitation par aimants permanents
- 1 canal
- 1 x servomoteur, 1 x frein moteur
- Tension d'alimentation électronique : 24 V DC
- Tension d'alimentation : 8...48 V DC
- Courant de sortie (rms) : 2,8 A
- Courant de crête (rms) max : 5,7 A pour 1 s
- Augmentation des performances avec cartouche de ventilateur ZB8610
- Fréquence du champ tournant : 0...599 Hz
- Fréquence de l'horloge PWM : 16 kHz
- Fréquence du contrôleur de courant : 32 kHz
Caractéristiques
- Nom/numéro de modèle
- EL7201
- Référence DirectIndustry
- 0014201003
Description
Le terminal EtherCAT EL7201 est conçu pour offrir des performances servo exceptionnelles dans un format compact. Grâce à son interface résolveur intégrée, il permet un contrôle rapide et précis basé sur la technologie de courant orienté vers le champ et le contrôle de vitesse PI. Ce terminal est idéal pour des tâches de positionnement dynamiques et rapides.
La surveillance de paramètres critiques tels que la surtension, la sous-tension, la surintensité, et la température assure une sécurité de fonctionnement optimale. Le système de communication EtherCAT et la couche d'application CAN-over-EtherCAT (CoE) garantissent une intégration parfaite avec les technologies de contrôle basées sur PC.
Les semi-conducteurs de puissance avancés minimisent les pertes d'énergie et permettent un retour d'énergie lors du freinage. Les 16 LED intégrées fournissent des indications claires sur l'état, les avertissements et les erreurs.
Caractéristiques principales :
- Technologie d'entraînement compacte
- Connexion directe au moteur + retour d'information
- 1 x feedback
- Moteur synchrone triphasé à excitation par aimants permanents
- 1 canal
- 1 x servomoteur, 1 x frein moteur
- Tension d'alimentation électronique : 24 V DC
- Tension d'alimentation : 8...48 V DC
- Courant de sortie (rms) : 2,8 A
- Courant de crête (rms) max : 5,7 A pour 1 s
- Augmentation des performances avec cartouche de ventilateur ZB8610
- Fréquence du champ tournant : 0...599 Hz
- Fréquence de l'horloge PWM : 16 kHz
- Fréquence du contrôleur de courant : 32 kHz
Vous pourriez aussi être intéressé par


-15%