Terminal EtherCAT de 1 canal para servomotorEL7201
411,40 €Precio con IVA
Cantidad
Pago seguro
Transferencia
Información de envío
2 artículos en stock
Gastos de envío a partir de:36,30 €Con IVA
Entrega entre el 16/10 y el 18/10
Vendido y enviado por





Descubre los productos de BECKHOFF
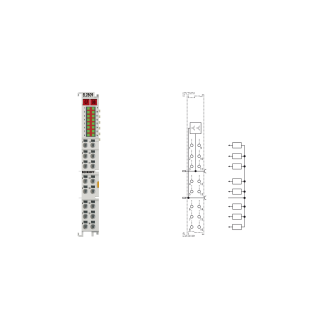
El terminal EtherCAT EL7201 está diseñado para ofrecer un rendimiento servo excepcional en un formato compacto. Con su interfaz de resolver integrada, permite un control rápido y preciso basado en la tecnología de corriente orientada al campo y el control de velocidad PI. Este terminal es ideal para tareas de posicionamiento dinámicas y rápidas.
La supervisión de parámetros críticos como sobretensión, subtensión, sobrecorriente y temperatura asegura una seguridad de funcionamiento óptima. El sistema de comunicación EtherCAT y la capa de aplicación CAN-sobre-EtherCAT (CoE) garantizan una integración perfecta con las tecnologías de control basadas en PC.
Los semiconductores de potencia avanzados minimizan las pérdidas de energía y permiten la retroalimentación de energía durante el frenado. Los 16 LED integrados proporcionan indicaciones claras sobre el estado, las advertencias y los errores.
Características principales :
- Tecnología de accionamiento compacto
- Conexión directa del motor + realimentación
- 1 x realimentación
- Motor síncrono trifásico excitado por imán permanente
- 1 canal
- 1 x servomotor, 1 x freno de motor
- Tensión de alimentación electrónica : 24 V DC
- Tensión de alimentación : 8...48 V DC
- Corriente de salida (rms) : 2,8 A
- Corriente de pico (rms) máx : 5,7 A durante 1 s
- Aumento del rendimiento con cartucho de ventilador ZB8610
- Frecuencia del campo giratorio : 0...599 Hz
- Frecuencia del reloj PWM : 16 kHz
- Frecuencia del regulador de corriente : 32 kHz
Características
- Nombre/número del modelo
- EL7201
- Referencia DirectIndustry
- 0014201003
Descripción
El terminal EtherCAT EL7201 está diseñado para ofrecer un rendimiento servo excepcional en un formato compacto. Con su interfaz de resolver integrada, permite un control rápido y preciso basado en la tecnología de corriente orientada al campo y el control de velocidad PI. Este terminal es ideal para tareas de posicionamiento dinámicas y rápidas.
La supervisión de parámetros críticos como sobretensión, subtensión, sobrecorriente y temperatura asegura una seguridad de funcionamiento óptima. El sistema de comunicación EtherCAT y la capa de aplicación CAN-sobre-EtherCAT (CoE) garantizan una integración perfecta con las tecnologías de control basadas en PC.
Los semiconductores de potencia avanzados minimizan las pérdidas de energía y permiten la retroalimentación de energía durante el frenado. Los 16 LED integrados proporcionan indicaciones claras sobre el estado, las advertencias y los errores.
Características principales :
- Tecnología de accionamiento compacto
- Conexión directa del motor + realimentación
- 1 x realimentación
- Motor síncrono trifásico excitado por imán permanente
- 1 canal
- 1 x servomotor, 1 x freno de motor
- Tensión de alimentación electrónica : 24 V DC
- Tensión de alimentación : 8...48 V DC
- Corriente de salida (rms) : 2,8 A
- Corriente de pico (rms) máx : 5,7 A durante 1 s
- Aumento del rendimiento con cartucho de ventilador ZB8610
- Frecuencia del campo giratorio : 0...599 Hz
- Frecuencia del reloj PWM : 16 kHz
- Frecuencia del regulador de corriente : 32 kHz
También podría interesarle