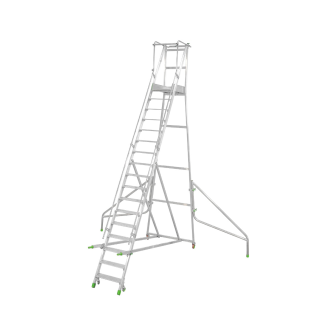
Plateforme de travail en aluminium 5 marchesRAPTOR
878,40 €Prix TTC
Quantité
Paiement sécurisé
Virement bancaire
Informations de livraison
10 articles en stock
Frais de livraison à partir de :34,80 €TTC
Livraison entre le 17/10 et le 19/10
Vendu et expédié par


Découvrez les produits TUBESCA COMABI
La plateforme de travail en aluminium est conçue pour un usage régulier sur sol plat. Elle offre une sécurité optimale grâce à ses caractéristiques avancées telles que le garde-corps rigide à 3 côtés avec sangle antichute arrière et les marches striées et antidérapantes de 80 mm.
Caractéristiques principales :
- Matériau : Aluminium léger
- Plateforme de travail antidérapante de 500 x 400 mm avec plinthes intégrées
- Porte-outils compartimenté supportant jusqu'à 10 kg
- Hauteur de travail maximale : 3,18 m
- Hauteur de plancher : 1,18 m
- Charge maximale : 150 kg
- Conforme aux normes PIRL 93353, EN 131-7, décret 2004-924
Fabriquée en France, cette plateforme est idéale pour les professionnels recherchant une solution fiable et durable.
Caractéristiques
- Nom/numéro de modèle
- RAPTOR
- Référence DirectIndustry
- 0024744943
- EAN
- 3178740234102
Description
La plateforme de travail en aluminium est conçue pour un usage régulier sur sol plat. Elle offre une sécurité optimale grâce à ses caractéristiques avancées telles que le garde-corps rigide à 3 côtés avec sangle antichute arrière et les marches striées et antidérapantes de 80 mm.
Caractéristiques principales :
- Matériau : Aluminium léger
- Plateforme de travail antidérapante de 500 x 400 mm avec plinthes intégrées
- Porte-outils compartimenté supportant jusqu'à 10 kg
- Hauteur de travail maximale : 3,18 m
- Hauteur de plancher : 1,18 m
- Charge maximale : 150 kg
- Conforme aux normes PIRL 93353, EN 131-7, décret 2004-924
Fabriquée en France, cette plateforme est idéale pour les professionnels recherchant une solution fiable et durable.
Vous pourriez aussi être intéressé par