

-12%
Codeur inc. Ø60mm Axe plein 10mm 04096i/t 4,5-5,5V TTL/RS422 M12 8PDFS60B-S4AC04096
-12%
341,88 €300,85 € Prix TTCQuantité
Paiement sécurisé
Virement bancaire
Informations de livraison
10 articles en stock
Frais de livraison à partir de :14,40 €TTC
Livraison entre le 17/10 et le 19/10
Vendu et expédié par









Découvrez les produits SICK
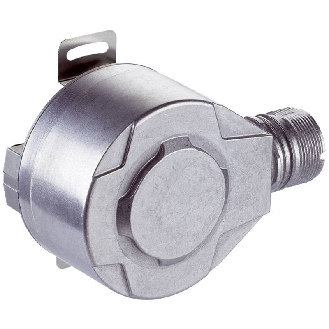
Codeur inc. Ø60mm Axe plein 10mm 04096i/t 4,5-5,5V TTL/RS422 M12 8P
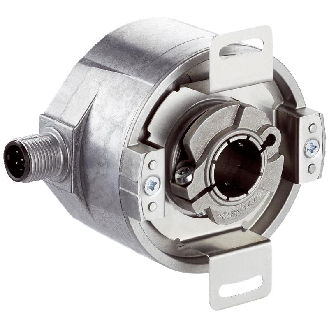
Le codeur incrémental de la marque Sick est un composant essentiel pour la mesure de la position et de la vitesse dans diverses applications industrielles. Voici ses caractéristiques clés :
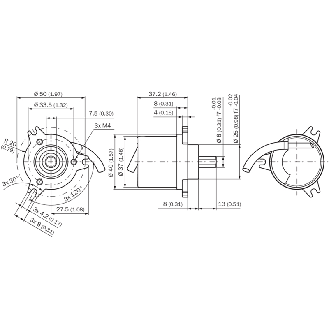
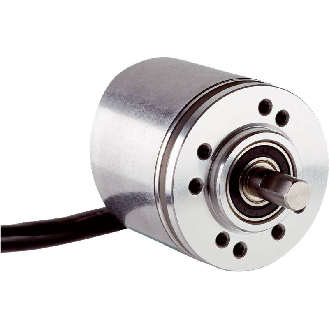
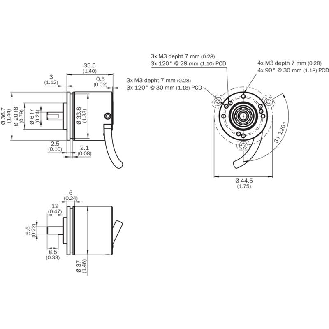
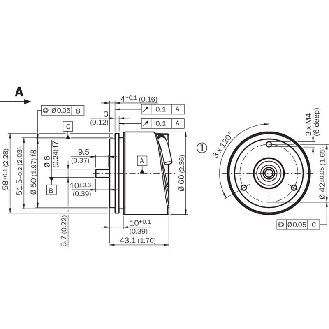
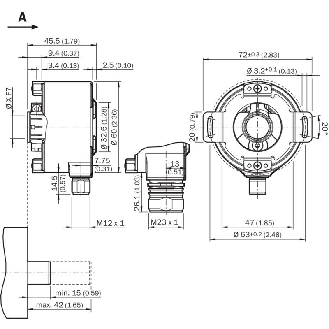
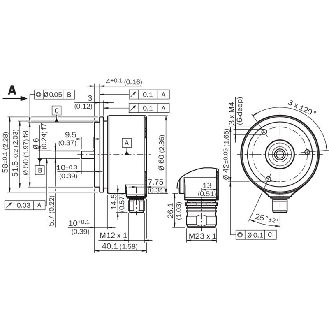
- Format : Ø 60 mm
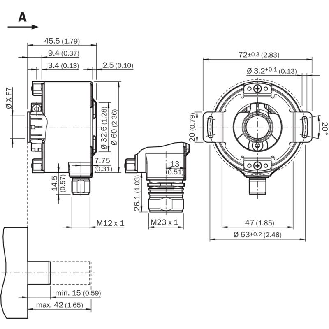
- Interface mécanique : Arbre plein, bride de serrage
- Diamètre de l'axe : 10 mm
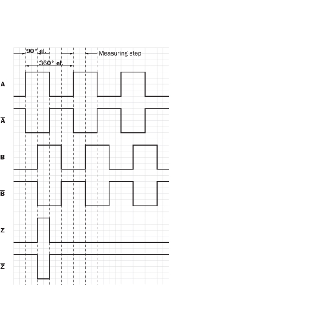
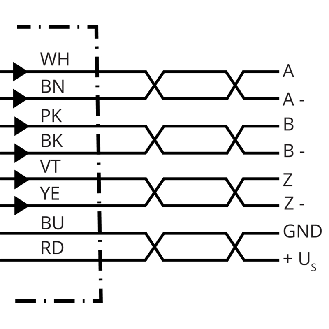
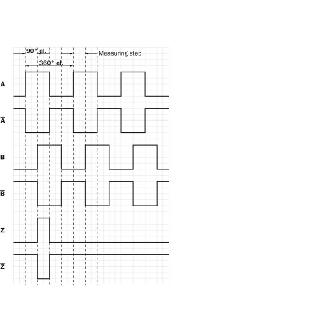
- Interface de communication : Incrémental / TTL / RS-422
- Tension d'alimentation : 4,5 V à 5,5 V
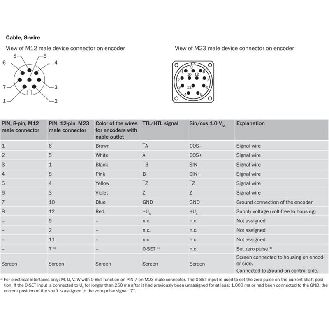
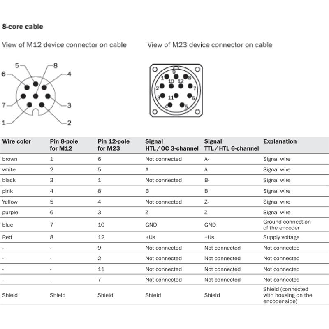
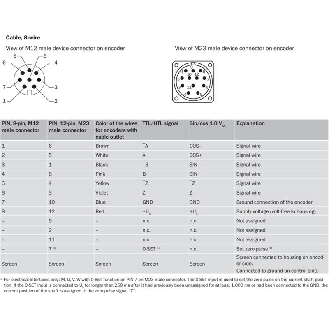
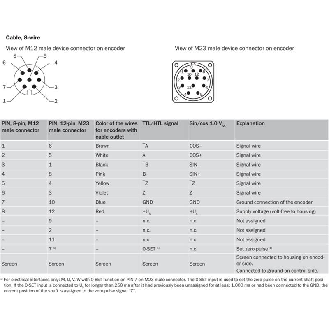
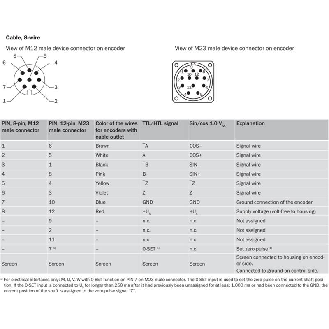
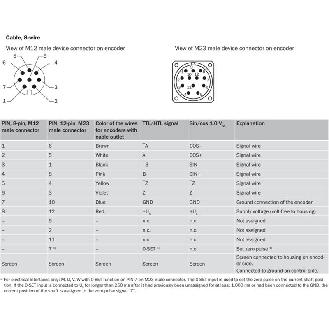
- Mode de raccordement : Connecteur M12, mâle, 8 pôles, radial
- Impulsions par tour : 4.096
- Programmable/configurable : Non
- Série : DFS60
Ce codeur rotatif de haute qualité offre une précision et une fiabilité exceptionnelles pour répondre aux exigences des environnements industriels les plus exigeants. Sa conception robuste et sa compatibilité avec diverses interfaces en font un choix idéal pour les applications nécessitant une mesure précise de la position et de la vitesse.
Caractéristiques
- Nom/numéro de modèle
- DFS60B-S4AC04096
- Diamètre du boîtier (mm)
- 60
- Diamètre de l'axe (mm)
- 10
- Référence DirectIndustry
- 0005837054
Description
Codeur inc. Ø60mm Axe plein 10mm 04096i/t 4,5-5,5V TTL/RS422 M12 8P
Le codeur incrémental de la marque Sick est un composant essentiel pour la mesure de la position et de la vitesse dans diverses applications industrielles. Voici ses caractéristiques clés :
- Format : Ø 60 mm
- Interface mécanique : Arbre plein, bride de serrage
- Diamètre de l'axe : 10 mm
- Interface de communication : Incrémental / TTL / RS-422
- Tension d'alimentation : 4,5 V à 5,5 V
- Mode de raccordement : Connecteur M12, mâle, 8 pôles, radial
- Impulsions par tour : 4.096
- Programmable/configurable : Non
- Série : DFS60
Ce codeur rotatif de haute qualité offre une précision et une fiabilité exceptionnelles pour répondre aux exigences des environnements industriels les plus exigeants. Sa conception robuste et sa compatibilité avec diverses interfaces en font un choix idéal pour les applications nécessitant une mesure précise de la position et de la vitesse.
Documentation technique
Vous pourriez aussi être intéressé par

-14%


-15%

-12%


-12%


-12%

-17%

-16%

-18%


-17%


-12%
-12%