

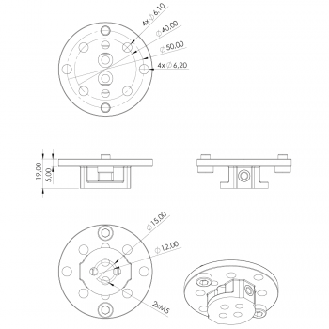
La construction à double piston permet datteindre une force de préhension élevée. Le design ultra-plat permet un gain de place et réduit les moments de flexion. Le guidage linéaire garantit une haute précision et une grande ...
338,40 € Prix TTC
Paiement sécurisé
Virement bancaire
Informations de livraison
50 articles en stock
Livraison entre le 05/12 et le 11/12
Vendu et expédié par





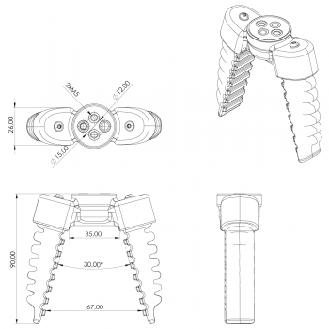
Les préhenseurs SoftGrippers sont conçus pour offrir une manipulation délicate et efficace des objets grâce à leurs doigts souples. Ces doigts s'adaptent à la forme de n'importe quel objet sans en altérer la surface, ce qui les rend idéaux pour les produits alimentaires.
Leur conception légère et leur rapidité d'action sont complétées par une compatibilité universelle avec les robots du marché. Les doigts, fabriqués en silicone conforme aux normes FDA, sont actionnés pneumatiquement pour une performance optimale.
Caractéristiques principales :
Les préhenseurs SoftGrippers sont conçus pour offrir une manipulation délicate et efficace des objets grâce à leurs doigts souples. Ces doigts s'adaptent à la forme de n'importe quel objet sans en altérer la surface, ce qui les rend idéaux pour les produits alimentaires.
Leur conception légère et leur rapidité d'action sont complétées par une compatibilité universelle avec les robots du marché. Les doigts, fabriqués en silicone conforme aux normes FDA, sont actionnés pneumatiquement pour une performance optimale.
Caractéristiques principales :
Vous pourriez aussi être intéressé par
La construction à double piston permet datteindre une force de préhension élevée. Le design ultra-plat permet un gain de place et réduit les moments de flexion. Le guidage linéaire garantit une haute précision et une grande ...
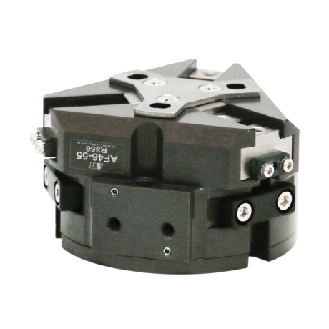
La pince pneumatique concentrique à 3 mors AF46-55-Y001 de JRT est conçue pour offrir une prise centrée et efficace grâce à sa structure cylindrique. Elle intègre un mécanisme de pression de surface par glissement conique, permettant ...

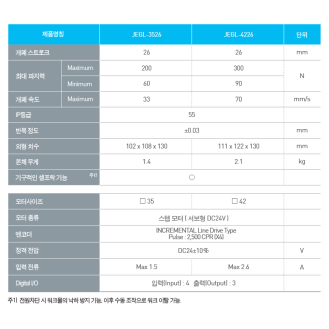

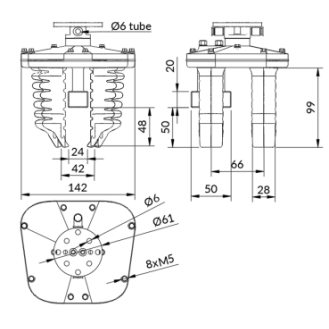
La pince électrique coulissante concentrique JEGL-3526-W de JRT offre une force de préhension élevée et une grande course, idéale pour saisir une large variété de pièces. Compatible avec des fonctions antipoussière et étanche, elle ...

Les préhenseurs SoftGrippers sont conçus pour offrir une manipulation délicate et efficace des objets grâce à leurs doigts souples. Ces doigts s'adaptent à la forme de n'importe quel objet sans en altérer la surface, ce qui les rend ...
SoftGripping


La pince électrique coulissante parallèle JEGH-4232N-W offre une force de préhension élevée et une étanchéité compatible avec l'huile de coupe. Son format compact permet la préhension d'objets variés avec un contrôle précis de la ...


La pince électrique angulaire concentrique JEGK-42130N-W de JRT offre une force de préhension élevée et une grande course, idéale pour saisir une variété de pièces. Elle est compatible avec une option antipoussière et étanche, ...


La pince électrique angulaire parallèle JEGBW-42140 de JRT est conçue pour offrir une sécurité optimale grâce à son interrupteur d'arrêt d'urgence intégré. Elle permet un contrôle précis de la vitesse, du couple et de la course, avec ...



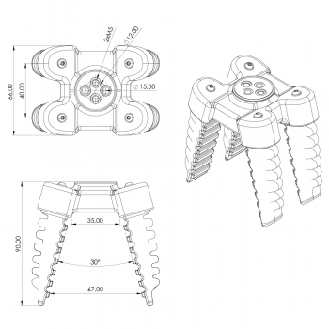
La pince à pilon SoftGripping est spécialement conçue pour manipuler les pilons de poulet avec soin et précision, ce qui la rend idéale pour les applications de transformation alimentaire. Dotée de l'innovant GorillaFinger, cette ...
SoftGripping


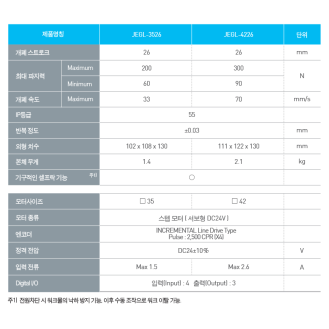
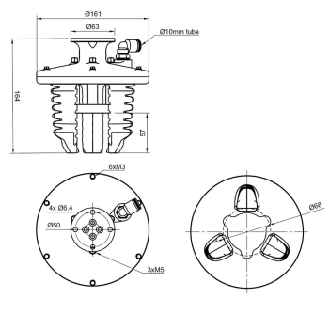
La pince électrique coulissante concentrique JEGL-4226 de JRT offre une force de préhension élevée et une grande course, idéale pour saisir une large variété de pièces. Compatible avec des fonctions antipoussière et étanche, elle assure ...


La pince à mozzarella SoftGripping SG.IG.F3.MG01 est conçue pour la manipulation douce et sûre des produits laitiers. Douces, délicates et riches en humidité, les boules de mozzarella doivent être manipulées avec précision et soin dans ...
SoftGripping

Les préhenseurs SoftGrippers sont conçus pour être légers et faciles à utiliser, sans arêtes vives. Leurs doigts souples s'adaptent à la forme de n'importe quel objet, préservant ainsi la surface de celui-ci. Ils sont particulièrement ...
SoftGripping



La pince électrique coulissante parallèle JEGG-2510 est conçue pour offrir une manipulation précise et sécurisée des pièces. Sa conception compacte et sa course variable permettent une flexibilité d'utilisation dans divers ...


La pince pneumatique parallèle coulissante est conçue pour offrir une force de préhension élevée grâce à sa construction à double piston. Son design ultra-plat permet un gain de place significatif et réduit les moments de flexion, ce ...


La construction à double piston permet datteindre une force de préhension élevée. Le design ultra-plat permet un gain de place et réduit les moments de flexion. Le guidage linéaire garantit une haute précision et une grande ...